LCPM:通用的空间成像应用柔性相机结构

通用的空间成像应用柔性相机结构
会议名称:低成本行星任务会议,帕萨迪纳,加利福尼亚州。
从左至右分别为火星科学实验室避险相机图像、火星科学实验室导航相机图像和近地小行星侦察兵任务相机图像

为什么NASA追求定制相机的发展?
- 首先是在科学或者工程上的需求
- 高分辨率以及大幅宽的探测器
- 灵敏度,信噪比以及截止频率的要求
- 合适的图像处理
- 然后是环境筛选(任务保障)
- 辐射,大范围的温度操作,装配技巧。
- 零件筛选,降额,跨温的表现。
结论:NASA需要一个可变的,可扩展的相机结构用来解决不同任务的需求。
上图中火星探险车的避障相机搭载8个滤光片,以及光学系统视角从16°x 16°改进至5.5°x 5.5°。
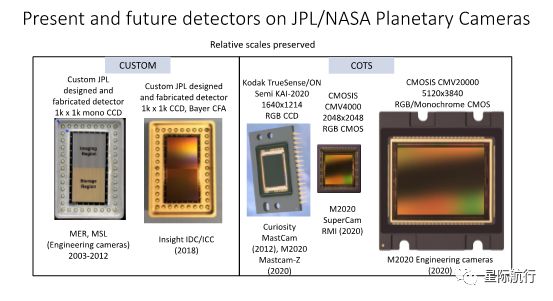
目前和将来喷气推进实验室以及NASA在行星相机上使用的探测器
(图片保留相对比例)
自主研制:
—JPL设计及生产的1k x 1k的黑白电荷耦合器件(CCD)探测器 ,用于MSL任务
—JPL设计及生产的1k x 1k的拜耳色彩滤波阵列的电荷耦合器件(CCD)探测器,用于洞察号火星车任务
市场上现货:
—柯达公司的真感光CCD探测器,用于2012年的好奇号火星车相机以及2020年的

火星2020增强版工程相机
—它是MER / MSL工程相机的后续产品
—也是任务中关键的成像系统(B类硬件)
—更拥有广泛的硬件筛选和资格认证计划。
—为降低进度风险,Mars2020选择了COTS的基准焦平面芯片(在JPL筛选)
- 选择了和从前B类成像系统不同的发展方向
- 描述了周围的环境
- 测试了辐射度。
重点:增强版的工程相机上出色的NRE的发展可以被加入到未来的相机系统中。

火星2020增强版工程相机的具体参数
成像能力
传感器种类 |
20M像元的CMOS传感器 |
阵列大小 |
5120×3840 |
像元尺寸以及中心距 |
像素尺寸为6.4um2,中心距为6.4um |
满井电荷量 |
15ke- |
像素暗噪声 |
8e- RMS |
窗口系统 |
存在 |
帧率 |
每秒0.45帧 |
快门 |
全局 |
色彩 |
拜耳RGB |
量化像素 |
12bit |
电接口
指挥与数据 |
低电压差分信号 |
协议 |
MER/MSL/Mars2020 NVMCAM |
电源输入 |
+5.5V (+/- 0.4V)】 |
功率 |
< 3 W |
内存 |
1Gbit SDRAM |
电场可编程逻辑闸阵列(FPGA) |
MicroSemi Rad-Tolerant ProASIC3 |
相机具体参数
质量 |
< 425g |
体积 |
65 mm x 75 mm x 55 mm |
工作温度域 |
-55C to +50C |
存活温度域 |
-135C to +70C |
光学系统参数
导航相机 |
95°X 71°(H x V), f/12, iFOV < 0.32 mrad/pix |
避险相机 |
134°X 110°(H x V), f/12, iFOV < 0.46 mrad/pix |

以上为火星2020增强版工程相机硬件研发团队。

从左至右为避险相机的结构部件
高效滤网、底端盖、主室、加热装置、位于底部电路板上的MICRO-D连接器、位于中间电路板上的铂电阻温度计、探测器电路板、陶瓷垫片、焦平面阵列、托架板、校准钉、垫片、光学镜筒组件。

Mars2020EECAM环境测试水平
左侧:温控表现以及测试等级
粉色框表示早期评估样品的温控参数,中间黄色框中表示试飞允许时的温控参数,绿色框表示允许起飞的温控参数。
右侧:包装资格和验证测试项目
季节 |
循环周期数 |
最低气温(°C) |
最高气温(°C) |
差值(°C) |
夏季 |
2115 |
-80 |
50 |
130 |
冬季1 |
450 |
-115 |
-10 |
105 |
冬季2 |
450 |
-110 |
20 |
130 |
总计 |
3015 |

火星2020增强版工程相机的环境测试等级
随机振动实验等级
火星车整体 |
频率(Hz) |
试飞允许的等级 |
早期评估时的等级 |
校准后的火星车整体 |
20-40 40-450 450-2000 (总体考虑后的参数) |
+6db/oct 0.04g^2/Hz -6dB/oct 5.6g/ms |
+6db/oct 0.08g^2/Hz -6dB/oct 7.9g/ms |
校准后的组件 |
20-40 40-450 450-2000 (总体考虑后的参数) |
+6db/oct 0.04g^2/Hz -6dB/oct 5.6g/ms |
+6db/oct 0.08g^2/Hz -6dB/oct 7.9g/ms |
另外还提供了三种相机冲击测试的参数。

火星2020号上的增强版工程相机由9个单元组成,
分别是6个避障相机、1个缓存相机以及2个导航相机。分布位置如图所示,火星车的前方左右两侧各有一个避障相机模组(可分离),后方有4个避障相机的捆绑组。两个导航模组位于上方,分别控制左右两侧的导航任务。最后一个缓存相机位于后方的上侧。

融入EECAM柔性的相机架构
相机 |
任务等级 |
电子部件 |
光学 |
发展现状 |
交付任务日期 |
任务需要日期 |
发射日期 |
||
发展 |
幅宽 |
瞬时视场角 |
|||||||
火星2020号上的改进版工程相机 |
B |
刚柔性,屏蔽EEE部件 |
自主研制 |
95° x 73° |
0.35 mrad/pixel |
照相机正在研制 |
2018.10 |
2019.1 |
2020.1 |
180° 对角 |
0.55 mrad/pixel |
||||||||
OCO-3号环境相机 |
C |
分离电路板,耐热部件,塑料连接器 |
市场现货 C接口(内部) F接口 (外部) |
32° x 28° |
0.125 mrad/pixel |
已经研制完成 |
2017.4 |
2017.6 |
2019(未确定) |
56° x 48° |
0.22 mrad/pixel |
||||||||
近地小行星侦察兵立方星 |
D |
分离电路板,耐热部件,塑料连接器 |
市场现货 C口 |
26.9° circle |
0.128 mrad/pixel |
正在进行测试 |
2017.8(计划) |
2017.9 |
2019(未确定) |
新视野/探险提案 |
B |
自主研制 |
|||||||
未来的小卫星以及其他提案 |
B/C/D |
自主研制或市场现货 |

电子结构
- 可重编程,基于闪存的FPGA
- 物理形状因子/尺寸变化而无需对设计进行重大修改
- LVDS物理接口上的多种数据协议(CameraLink,SpaceWire,......)
- 特定于应用程序的接口/硬件的扩展端口
- 适应性传感器接口
- 流程图为第一代CMV2000

模块化电子设备的使用
如图所示,用于模块化配置的带有塑料连接器的电路板,成本低,且耐用性高。从上到下三层电路板分别为传感器、接口以及电源。

图为近地小行星侦查兵电子电路集成相机电子叠层结构,尺寸为57×57×65。每层正反面均刻有电子电路,从左至右分别为传感器、接口和电源的实物图。

可扩展的FPGA固件和数据接口
柔性数据接口
- 低压指令和遥测接口 低电压差分信号(LVDS)物理层
- 给定任务接口的适应性协议选项
相机 |
物理层 |
协议 |
火星2020增强版工程相机 |
LVDS |
遗产号着陆车CMD/TLM接口 |
OCO-3 |
LVDS |
改正版Cameralink |
近地小行星侦查兵 |
LVDS |
Spacewire |

可扩展的FPGA固件和数据接口
FPGA内的图像处理
•图像窗口
•像素分级和合成添加
•支持各种分级算法的多种模式(4x4,2x2,...)
•可选择的共同加法因子,通过添加帧来增加场景信噪比(SNR)
•未来的可能性
•彩色滤光片阵列(CFA)可去马赛克
•压缩

可变帧大小和速率
帧尺寸(像素) |
最大帧率 |
5120x 3840(满帧) |
4 |
3840x 2160(4k) |
7 |
1920x1080(1080p) |
14 |

火星2020增强相机FGPA资源利用率估算,表格内数据基于当前的设计实施

相机/组件的辐射容差
耐辐射EEE部件
•对单粒子翻转和锁定免疫
•根据任务等级,屏蔽与未屏蔽的飞行部件可以进行基线设置以节省成本
检测器辐射测试@ UC Davis和Texas A&M
•总综合剂量(TID)性能远远超出Mars2020要求(8k TID,RDF = 2)
•闩锁效应 - 由寄生二极管结构中的重离子相互作用触发的电源轨和地之间的短路
•在德克萨斯A&M大学回旋加速器设施进行测试。
•仅在一个电压轨上发现锁定行为
•预测的闩锁率为0.03事件/年。
•要求<10-4事件/年
•缓解策略是在相关检测器和改进版工程相机占空比的曝光和因子之间关闭检测器
•工作周期因素可将速率降低至约10-5 /年
•经测试的设备可锁定数百次而不会丢失成像功能 - 无设备故障

机械配置
•允许用户优化相机占地面积以满足任务约束
•体积,质量,屏蔽要求
•根据环境要求量身定制的包装方法
•深度热循环与热控环境
•模块化光学元件安装座
•支持自主研制或使用现有的光学支持
•单摄像头电子盒设计可支持多种镜头配置
图中分别是3种相机的机械配置,尺寸及接口大小(C接口和F接口)

柔性光学系统配置
图中传感器半径从里到外大小分别代表了3种相机的传感器大小。
已经存在的的光学系统配置 |
||
火星2020增强相机 |
导航相机 |
95°X 71°(H x V), f/12 iFOV < 0.32 mrad/pix |
避险相机 |
134°X 110°(H x V), f/12 iFOV < 0.46 mrad/pix |
|
OCO-3 |
内部背景相机 |
32° x 28° (H x V), f/5 iFOV < 0.125 mrad/pix |
外部背景相机 |
56° x 48° (H x V), f/2.2 iFOV < 0.22 mrad/pix |
|
近地小行星侦察兵 |
外部导航/科学相机 |
26.9° image circle, f/2.8 iFOV < 0.128 mrad/pix |

OCO-3外部背景相机重632.75克,内部背景相机重461.5克

下一步
•为了即将到来的任务支持构建到印刷或设计现成的相机开发。
•调整电子设计以支持未来的焦平面(例如CMOSIS,CMV50000)
•从20M像素到50M像素
•建议支持科学和工程行星相机任务
•新前沿/发现(B类)
•立方星或技术演示证明(D类)

喷气推进实验室工程相机的成本和进度表现
——为了满足火星科学实验室的好奇心
- 建造了26个摄像头,12个在火星上(其他EM和备用,2个现在到InSight)。
- 建造了9个导航相机,17个避障相机,在预算范围内交付。
- 2008年5月交付的28个月建设,与2008年5月计划授权/资助后继续进行。
- 还有10个以上摄像机,分别命名为Spirit和Opportunity,还有2个凤凰号。
- 截至2017年7月,超过100,000张图像和计数。
- 没有飞行中的故障。

总结
- 利用火星2020相机开发商业技术和高可靠性包装,为行星任务提供低成本相机
- 可以定制模块化摄像机架构,以满足特定任务的要求和资源
右图为在2012.8.6好奇号的导航相机发回的图片
中间三图从上至下为火星探险号留下了扬起的尘埃
右图 我们着陆啦~来自好奇号的避障相机