中科院在空間機器人自主操控研究中取得進展,可提升機械臂操作精度
IT之家1月23日消息,據中科院消息,近日,中國科學院瀋陽自動化研究所在空間機器人自主操控方面取得進展,針對航天器平臺和機械臂的動力學耦合提出基於時延估計的無模型解耦控制算法。
據介紹,由於外太空高低溫、超真空、強輻射等惡劣環境,由航天器和機械臂組成的空間機器人系統具備航天器的機動能力和機械臂的操作能力,未來將廣泛應用於在軌服務和深空探測領域。
空間機器人可承載大量的自主操作任務,如抓捕、裝配、搬運以及採樣返回等。對於此類機器人,航天器平臺和機械臂之間存在複雜的動力學耦合作用,影響機械臂末端的操作精度。因此,如何有效抑制或補償基—臂耦合作用是空間機器人領域的熱點和難點問題。
爲此,瀋陽自動化所空間自動化技術研究室科研人員基於時延估計(Time-delay estimation, TDE)算法和超扭轉控制(Super-twisting control, STC),提出一種無模型魯棒解耦控制算法。IT之家瞭解到,該方法本質爲瞬態學習控制算法,通過引入常數對角陣對動力學模型進行改造,將新模型劃分爲線性項和新非線性項,利用模型前一時刻的觀測信息和控制輸入來估計當前時刻系統的新非線性項,實現系統高效解耦。
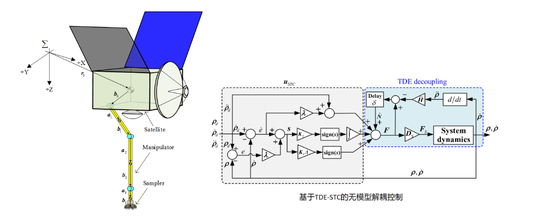
該方法優點在於不需要實時計算系統模型參數,算法具有內在自適應性,計算效率高。該成果將爲後續開展空間機器人在軌服務和深空探測任務提供理論基礎和技術支撐。