坐上無人車在黑夜的中國高速上"飛馳",竟是這番感覺
摘要:主要目的,是爲了測試與體驗紐勱科技前裝方案中“車道保持”“自動變道與跟車”“上下匝道”等幾個常見的高速路自動駕駛輔助功能。實際上,自動駕駛前裝解決方案供應商紐勵科技這次邀請我們體驗的“高速代駕”能力,包括“自適應巡航”(ACC)“自動變道”(AIC)“車道居中控制”(LCC)“出入匝道”(On/Off ramp)等一系列自動駕駛輔助配置,在高檔乘用車上並不少見。

歡迎關注“創事記”微信訂閱號:sinachuangshiji
“無人車應該被設計地‘壞心眼’一點,要不然鬥不過人。”來自一位上海司機的吐槽。
文/宇多田
來源:機器之能(ID:almosthuman2017)
晚上 8 點左右的上海中環,處於晚間車流量高峯期的尾聲階段。
儘管這個時候高架橋上的車流量遠沒有達到“比肩接踵”的程度,但中型貨車隨時從旁邊強行併入車道,偶爾前方車輛來個緊急減速……
都是一堆可以助你成長爲老司機的“送分題”。
不過,作爲一名坐在副駕駛座上的“局外人士”,我一邊裝作若有所思的樣子望着車窗外幾輛中型貨車擦肩而過,一邊觀察着正在旁邊自由旋轉的方向盤,突然感覺有點“膨脹”:
嗯,如我一般沒錢買特斯拉的窮人,也不應該被剝奪在高速路上睡覺和裝逼的權利。

就在前天,兩輛裝有自動駕駛輔助系統的四門轎車載着我上了上海中環。
主要目的,是爲了測試與體驗紐勱科技前裝方案中“車道保持”“自動變道與跟車”“上下匝道”等幾個常見的高速路自動駕駛輔助功能。
比較幸運的是,這一次體驗多了一些可選條件來保證整個試乘具有足夠的真實性與複雜度。
首先,他們測試車隊其中有一輛車剛剛纔爲某合作車廠調試好就運到了現場。
因此,即便事先對測試道路進行了“踩點”,也能在一定程度上反映這輛車真實的自動駕駛輔助水平。所以……我兩次換車進行了體驗。
其次,可以在一定的時間範圍內選擇試乘時間。
中午至下午 4 點前的路況,與早晚高峯期以及晚間的路況相比,行車難度要低很多。
因此,我晚上又“強行”跟車出去溜了一圈。
最後一點,我可能真的很幸運——測試車出現小 bug 的一個特殊場景真的被我遇到了。
以上爲路測視頻精選,一定要點開看!
坦率講,在中午 1 點左右上中環快速路,整個過程其實略顯無聊。
這輛經過改裝的福特蒙迪歐無論是加速跟車,還是打轉向燈進行換道,都相對順滑流暢,在一些操作的關鍵節點幾乎感覺不到是機器在對車身進行控制。

當然,這一方面跟寬敞、平坦且車道線清晰的路面以及這個時間段稀疏的車流量有很大關係;
另一方面,對於乘用車前裝市場來說,“自適應巡航”與“自動變道”等功能配置在車上如今已經並不少見。
但不能忽視的一點是,當天的天氣實在有些鬼畜——
多雲轉陰天轉小雨,外加整個測試過程要途徑隧道與大片頭頂有鏤空遮擋物的路段,都是給路測增加難度的加分項。
所以,在結束自動駕駛接管模式的 5 分鐘前,除了能堅持把兩個大拇指 20 分鐘放在方向盤下方一動不動的安全員小哥,車上一衆乘客都呈現昏昏欲睡的狀態。

不過“驚喜”,就在這個時候出現了。
當我在詢問工程師平時會在測試中發現哪些問題時,這時正跑在隧道里的車就突然來了一次緊急剎車(下圖),然而在前方肉眼可見的範圍內,並無正在行駛的車輛。
我明顯感覺到這是一次由急到緩、有控制的剎車,因此儘管瞬間降速,但沒有產生不適感。
某種程度上,這種 bug 對試乘者來說是一個驚喜。在測試階段更多地發現失誤,意味着進入量產階段後更高的安全概率。
“你一說問題就真來問題了,”工程師把這次的突發情況歸結爲“系統產生的誤判”,不過平常並不多見,因此他也覺得有點難得,
“每輛車根據調試的鬆緊對周邊環境的反應有很大差異,這輛車由於剛給合作伙伴調試好準備運到 CES 上去,因此還是個‘新手’。我們會把這次的情況記錄下來回去做進一步分析。”
當我繼續追問是否跟隧道的環境有一定關聯時,他並未否認。

發生緊急剎車的位置,可以看到我手中相機有一瞬間明顯抖動
以這次突發情況爲基點,返回去看這套前裝方案的硬件配置,就會直觀有趣的多。
這輛車環繞配置了 12 個攝像頭。僅正前方就有多達 3 個三目攝像頭,車身左右的前後側分別裝有一個攝像頭,另外還有 1 個後視攝像頭與 4 個魚眼。
以攝像頭套件爲核心,5 個毫米波雷達、12 個超聲波雷達、1 個 DMS(駕駛員監測系統)、2 個 ECU(車載電腦)外加汽車自帶的低成本慣導與 GPS,組成了一套 360 度視野全覆蓋方案。
很明顯,這種 L2~L3 級自動駕駛乘用車的輔助功能配置與成本浮動範圍,是完全按照車廠當前的付費意願做出的選擇。
而從城市快速路與高速公路的現實條件來看,不乏有長隧道區域。
由於在隧道中無論是光線還是信號都會變弱很多,因此我們猜測這對於在方案裏“抗大旗”的攝像頭與普通 GPS 導航地圖來說,應該是一個需要進一步調試的特殊場景。

圖中爲紐勱科技 CEO 徐雷講解這套前裝自動駕駛方案的硬件配置
白天“過於順利”的測試,實在不能滿足我“想來駕駛無人車一次‘奪命狂奔’”的夢想。
爲了給測試增加一點難度,我想在晚上 7~8 點的時間段再次上路。這其實才是夏季裏的絕佳測試時間點之一——
夜幕基本降臨,而且處於下班高峯期,外加一點小雨……完美。
在我的強烈要求下,紐勱科技的工程師小哥只得又載着我再次駛入中環快速路。這一次的路況,也終於在我的期待下變得複雜起來——
有狹窄的高架路段,也有 S 形上下坡的進出口匝道。
當然,還有比下午時段多得多的同行車輛。

這次的安全員小哥看起來有點閒適,在進入城市高速路切換爲自動駕駛模式後,他就擺了一個照全家福那種一家之主的坐姿,身板挺直,手握膝蓋,一動不動地直視前方……讓方向盤完全暴露在我的手機鏡頭裏。
與此同時,測試車在進入自動駕駛模式後,開始逐步加速超車換道,嗯,越過一輛是一輛(只有這時纔有點小興奮)。

實際上,當一輛大巴以極近的距離從旁邊擦過時,知道是一個老司機在給你開車,和知道是一個機器人在開車,心境肯定不一樣。
這就有點像當你知道一個人剛拿到駕照時,是絕對不會坐着他的車上高速的。
但好在這些車此前已經經過了嚴格且繁複的車廠功能驗證與路測,因此,從這輛測試車在夜晚的功能演示效果來看,除了在加減速時有輕微的波動外,跟白天幾乎沒什麼差別。
特別是在變道和減速時,不看那個正在自動旋轉的方向盤,以行車的順滑度來看,我不會認爲是機器人在進行操作。
此外,除了能與前車始終保持安全距離,它與左右車的距離保持與反應看起來更加敏捷與鎮定。

但整晚最有挑戰性的場景,無疑是在匝道口 (上圖)。
在中環轉羅山路高架時,我們需要一次進行進出匝道的操作,在安全員小哥按設定打轉向燈以後,測試車按照限速牌的指示,將速度從 70 公里/小時降到了 40 公里/小時。
整個過程讓人印象深刻的有兩個點:
在出入匝道時,顛簸和晃動感比走主路會更強一些,反正睡覺的話會醒。
根據測試員的解釋,顛簸的原因在於匝道的路況要比主路複雜許多:“除了有斜坡,在匝道進口處是沒有線的,而且彎道的導流線是‘折線’形狀,在匝道快出去的時候線又變成 S 形的。”
方向盤的轉動幅度較大,看起來有點“癲狂”。工程師解釋這是因爲斜坡導致車上的傳感器的“視野”會受到限制。
“下斜坡的時候車‘看’車道線可能會偏一些,所以車要隨時進行內部校正,否則就會壓線(壓線要扣分!)。”他認爲這是個小問題,不會對安全性造成影響。
整個體驗下來,除了輕微的顛簸,我的心情其實有點複雜。
高興的是,我們可能真的需要爲打發車上的時間做好準備了;
但不開心的是,“奪命狂奔”感較弱……
當然,這是主機廠喜歡的安全感,因爲安全的極致,其實約等於“無聊”。

將要回到主路
實際上,自動駕駛前裝解決方案供應商紐勵科技這次邀請我們體驗的“高速代駕”能力,包括“自適應巡航”(ACC)“自動變道”(AIC)“車道居中控制”(LCC)“出入匝道”(On/Off ramp)等一系列自動駕駛輔助配置,在高檔乘用車上並不少見。
當然,要說把這些功能做的最好用的汽車品牌,翹楚莫過於特斯拉。
早在 2014 年特斯拉推出第一代自動駕駛輔助系統(Autopilot1.0)時,就能實現 ACC 自適應巡航功能——
通過自動加速或減速保持與前車的安全距離;
想變道超車,打左右側轉向燈就能自動完成任務(因爲當時車身左右側還沒有攝像頭,因此需要車主自己確認行駛過程中兩邊是否有快速行駛的汽車)。
而後來隨着硬件配置與軟件包的不斷升級以及數據的大量積累,特斯拉這套系統功能的好用度在呈指數級進步的同時,也把絕大部分車廠甩在了屁股後面。
而與此同時,越來越多的特斯拉車主都會隨車購買 Autopilot 軟件包(這也要取決於車的硬件升級,硬件配置不同支持的具體功能數量也不同),雖然許多車禍案例讓這個系統一直被人詬病,但是它也曾救過人,比如下面這種應急反應。
因此,對於很多車廠來說,要做到模仿到位或直接超越,就要把相同的功能在中國路況中做的同樣好或者更好,同時價格也必須更具優勢。
然而,就這兩點,歷史證明其實蠻難做到,所謂的彎道超車也絕非易事。
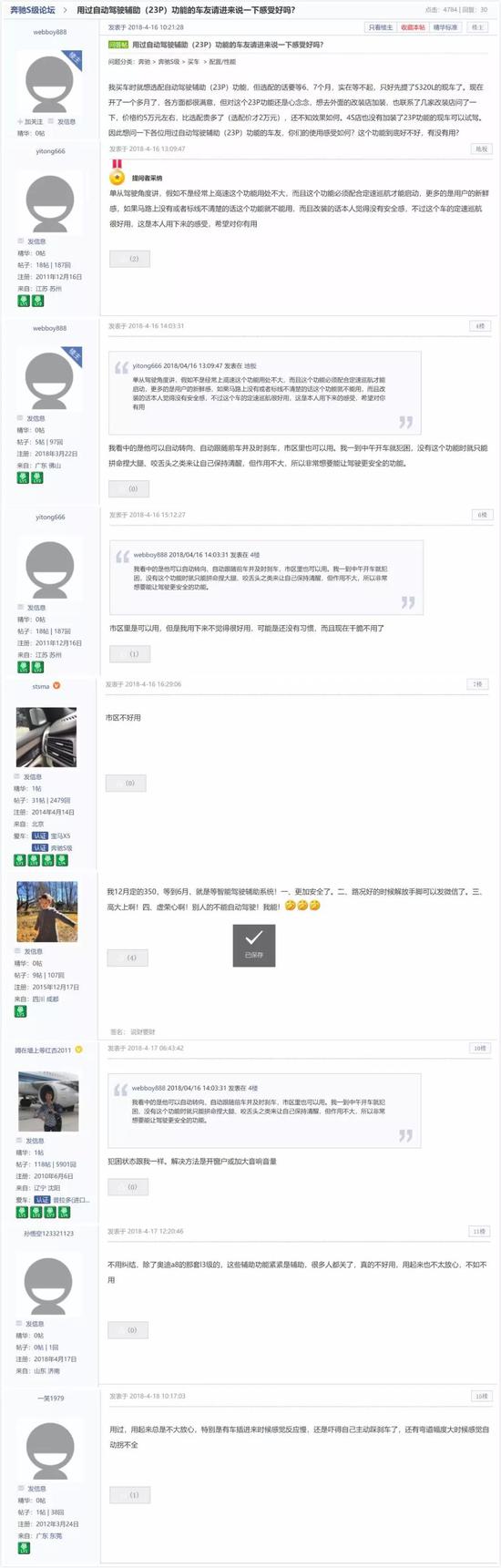
汽車之家一些奔馳用戶吐槽相關功能在其他車上其實並不好用
2018 年,中國汽車工程研究院股份有限公司共對 25 款車型的 ADAS 相關功能進行過測試比較,而結果顯示,儘管這些車型都具備 AEB(自動緊急制動系統)、LDW(車道偏離報警系統),ACC(自適應巡航控制系統)、BSD(盲區監測系統)、APS(自動泊車輔助系統) 等輔助駕駛功能,但性能差異卻非常大。
而特斯拉,仍然是某些單項功能水平最高的車廠之一。

圖片來自中國汽研承擔建設的智能汽車集成系統實驗區 i-Vista
因此,與其追求虛無的自動駕駛等級,不如幫車廠把“歷史留存問題”(自動駕駛輔助功能)解決好,是促使當下許多技術公司開始向前裝自動駕駛輔助方案提供商轉型的“錢提”。
這也是橫向對比各家技術公司“計算機視覺技術”以及“多傳感器融合技術”等技術能力的最好測試方法。
“我可以給出很多指標,但是我無法給出‘多傳感器融合做的究竟怎麼樣’這個問題的答案,”
紐勱科技 CEO 徐雷並不認爲技術可以用來被衡量效果,因爲買車和開車的人不會在乎這個問題。
“就連車廠可能也不清楚怎麼去判斷這些技術指標。
算法能力強不意味着操作平臺做的好,感知融合不意味着控制就做得好,軟件做得好不意味着軟硬耦合做得好。
以上每個模塊做的都好,不意味着一套方案就能結合的好。
否則,這麼多廠商都用的 Mobileye 的芯片和英偉達的計算平臺,爲何效果差距還如此之大。”
也許是出身於特斯拉 Autopilot 團隊,徐雷非常認同馬斯克做自動駕駛系統的產品思維:
“馬斯克對自動駕駛理解比較深刻的一點是,他知道要達到什麼樣的效果來說服你。
包括後來要研發 DMS(駕駛員監控系統)也好,環視系統也好,都是在用科學方法保證系統安全前提下的最好補充。
就像你在給客戶倒車的時候,你爲什麼要給他看你倒車的場景,如果你係統足夠安全,他也不想看這個,但他只關心這個車是否能順利倒進去。
至少現階段來講,對車廠來說,相關配置就三個條件,安全、經濟和高效。
你能把這三項證明給他們和消費者看,你的技術就是過關的。”

駕駛員監測系統也逐漸被視爲前裝自動駕駛系統解決方案不可缺少的一環
因此,如何將自動駕駛輔助系統做的好用的同時控制住成本,且更加符合中國交通及路面條件,是包括紐勱科技在內諸多中國技術創業公司正在努力的方向。
“中國的匝道要比美國要複雜很多。”
同時在美國進行路測的紐勱科技決策組負責人發現,美國道路上的線要相對畫的簡單一些,
“像中國環路上的匝道導流線,形狀都奇奇怪怪的,所以也要結合行車歷史軌跡與導航地圖一起判斷。
像特斯拉的車目前遇到這種匝道的話,(自動駕駛模式)是開不了的。”
在成本方面,選裝 Autopilot 基礎軟件包的價格當前基本在 1 萬美元左右,而紐勱科技表示,假如對標,則希望能將定價控制在 1~2 萬人民幣,但作爲前裝方案技術公司,這在很大程度上要取決於車廠的要求。
“本土 Tier1 德賽西威給了我們很大的硬件支持,他們同時也是英偉達相關產品在中國的唯一代理商,因此在成本上不會有太大壓力。
但這僅僅是我們根據競品換算的一個數字,這個數字的重點在於對標產品 Max 系統的功能安全性和效果都不輸給特斯拉。”
換句話說,他們給自己的定位就是“中國本土版 Autopilot 系統供應商”。
不過,好幾年來每家造車新勢力與自動駕駛前裝方案廠商都說過自己想對標特斯拉,但後者從來都是一直被模仿,從未被超越。
而在有特斯拉研發背景加持下,紐勱團隊要想獲得更大的市場認可,還需要接受更多特殊路況與人類司機機動性行爲的考驗。
“很明顯呀,你看視頻裏的車在過匝道時明顯減速了,後面那輛大巴一出溜就超過去了,這速度一看就是超過 40 公里/小時的,”
一位山東的老司機在看完視頻後提出的質疑,
“這時候過匝道的車根本不多,而且上海這裏是雙道,即便超車也容易,不得不感嘆上海的路面情況真不錯。
讓它來山東試試,匝道不僅窄,而且大家都開的飛快,根本沒人會遵守限速,因爲沒攝像頭,你在前面這樣限速開就是擋路!”
很現實,人類大腦可以被模仿,但沒有什麼能打敗人的主動意識。
關於“匝道限速”的問題,很多車主也在汽車之家論壇裏討論過,基本上大家都不太重視匝道的限速標識。
“自動駛汽車還是太老實了,有一說一,但說實話很多人的素質比不過無人車。”他感慨道。

在結束這次路測體驗後,我坐在開往機場的出租車裏,又聽到了來自上海司機師傅對當地路況發自肺腑的吐槽:
“你就是在浦東最好開的路上試了試,浦東很多路都是後開發的,基礎設施很全,等一會兒就進浦西了,讓車到那裏試一試,那裏的交通是真混亂。”
他似乎不太相信自動駕駛輔助系統能有太大作用,
“上個月,就在我旁邊,兩輛車就撞了,有輛車沒開轉向燈就想插進來,後面的沒躲過,這情況真的不少見。
很多人就是不打轉向燈換道,你能怎麼辦?無人車能避過嗎,應該被設計地‘壞’一點,要不然鬥不過人。
特別是匝道,大家都超速過,也不打轉向燈,還有在匝道倒車的,這麼邪門的事兒應該讓無人車遇一遇。”
而這時,恰好聊到交通事故的時候,上午 9 點左右在上海外環路上的一起“意外事故”又被我遇上了(我貌似有雨神蕭敬騰的體質)——
一輛車撞上了前車的屁股,車尾凹陷了一大塊,車燈也碎了。
匆忙間只拍到一個被撞凹陷的車尾
“你看看 你看看!後面的人肯定是在看手機,車距太近也沒注意!”路過事發現場時,這位上海司機師傅立馬拍着大腿搖頭嘆氣,
“輔助駕駛系統現在有車距保持功能,這個是不是比過匝道更實用一點?”我問,
“普通車哪安的起啊,你安了你後面的車不安也不行。”
“那價格降了你會考慮買這種車嗎?”
“看情況吧,買車選的條件很多,還是得更慎重一些的。”