中國軟體機器人突破萬米級深潛 刷新世界紀錄
原標題:工業之美丨中國軟體機器人突破萬米級深潛,刷新世界紀錄
中國研發出的軟體機器人創造了新的世界紀錄。
據央視財經6月初報道,中國研發出的軟體機器人在太平洋馬裏亞納海溝完成測試,成功突破了萬米級深潛,刷新世界紀錄。
該報道稱,浙江大學航空航天學院的李鐵風教授團隊聯合之江實驗室,成功研製了無需耐壓外殼的仿生軟體智能機器人,並於2019年底首次在馬裏亞納海溝實現了自主遊動。
這項研究成果作爲封面文章,刊發在今年3月4日的國際頂級期刊《自然》。

由於地處板塊俯衝地帶,馬裏亞納海溝的海底地質運動非常活躍,海溝深處水壓高、完全黑暗、溫度低、含氧量低,是公認的地球上環境最惡劣的區域之一。
李鐵風團隊研發的軟體機器人,在該海溝10900米處進行測試。在2500毫安時單節鋰電池的驅動下,機器人按照預定指令拍動翅膀,每秒自驅動一次,撲翼運動長達45分鐘,試驗各項測試數據達到了預定目標。
此次測試是人類研製的軟體機器人自驅動試驗在馬裏亞納海溝創下的新紀錄,也是中國研發軟體機器人首次突破萬米級深潛。
在如此深的海底,靜水壓高約110兆帕,接近於1100個大氣壓。過去的深海機器人,通常採用高強度的金屬外殼或壓力補償系統來保護自身不會壓碎。
浙江大學航空航天學院官網顯示,李鐵風團隊研發的仿生軟體機器人,由軟體人工肌肉驅動一對翅膀狀的柔性胸鰭,通過節律性撲翅實現遊動。
此外,控制電路、電池等硬質器件,被融入集成在凝膠狀的軟體機身中。通過設計調節器件和軟體的材料與結構,使得機器人無需耐壓外殼,就可以承受萬米級別的深海靜水壓力。
李鐵風團隊設計的自供能仿生軟體機器魚 圖片來源:《自然》雜誌
這款仿生軟體機器人的設計,受到深海獅子魚的啓發,形狀也類似一條深海獅子魚,長22cm,翼展寬度28cm,約爲一張A4紙的長寬。
科研團隊表示,通過對深海獅子魚的結構分析,發現深海獅子魚的骨骼細碎狀地分佈在凝膠狀柔軟的身體中,有助於其在高壓力環境下的生存與活動。
因此,科研團隊採用了“以柔克剛”的策略,使機器人實現了適應超強壓力而保持結構功能完整。
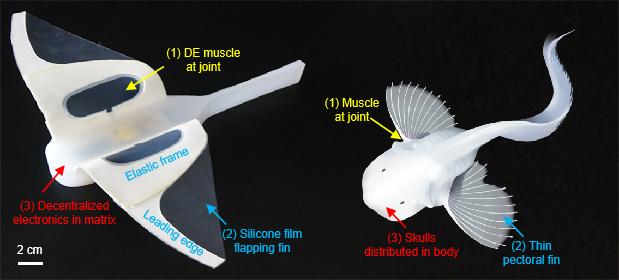
軟體機器魚的結構設計 圖片來源:《自然》雜誌
仿生軟體機器魚在深海實現驅動,需要解決的一大問題是,如何有效避免高分子材料在高壓和低溫時電驅動能力的衰減。
浙江大學航空航天學院官網顯示,爲此,李鐵風團隊與浙江大學化學工程與生物工程學院羅英武教授課題組合作,研製了能適應深海低溫、高壓等極端環境的電驅動人工肌肉,在高壓低溫環境下依然能保持良好電驅動性能。
這款電驅動人工肌肉也是團隊研究工作的另一個重要突破。
在此基礎上,科研人員利用圍繞在人工肌肉外的海水作爲離子導電負極,由機器魚自帶能源在人工肌肉內外側厚度方向產生電勢差,讓高分子薄膜發生舒張與收縮形變。由此,實現“翅膀”的上下拍動,推動機器魚在水中前行。
仿生軟體機器魚煽動翅膀 圖片來源:《自然》雜誌
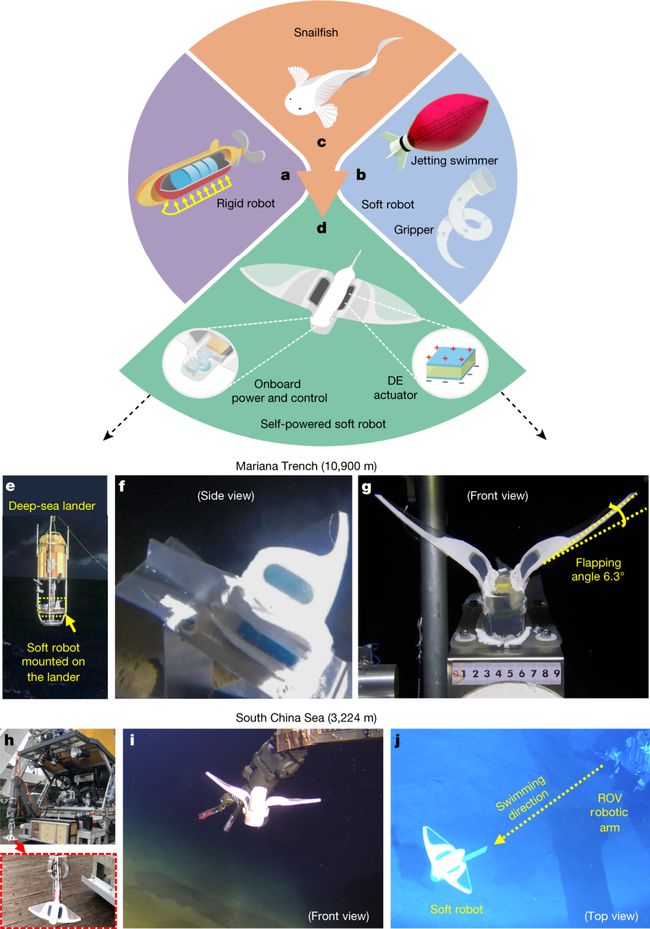
具有機載電源和控制功能的軟體機器魚的深海現場測試。圖片來源:《自然》雜誌
“我們的研究目標是以全新技術路線實現深潛器的小型化、柔性化、智能化,大幅降低深海探測的難度和成本。”李鐵風在《浙江日報》採訪是表示。
這種環境自適應的仿生軟體機器人和智能系統,可爲深海探索科考、環境監測與資源勘探提供解決方案,也爲複雜環境與任務下,機器人及智能系統的設計提供新思路。
根據國際機器人協會的調查數據顯示,全球工業界只解決了3%至4%的規則、剛性物品的自動化生產搬運問題,剩餘96%左右的柔性異形、易損物品仍使用人工上下料。
關於軟體智能機器人的研究,國內外科研機構也一直在進行。
2016年,TechnologyReview網站顯示,哈佛的研究人員製作了一款章魚狀的機器人,全身軟體且可以自動移動。這也是世界上首個全軟體機器人。
這是個氣動機器人。研究人員把過氧化氫液體泵入到機器人身體裏的兩個容儲器中,與體內的鉑線催化反應產生了氣體。氣體通過芯片控制,先引入到機器人一半的觸手,再引入到另一半觸手,交替反覆釋放,使得機器人看起來像在跳舞,不斷地擺動觸手,開始移動。
2019年6月2日,哈佛大學約翰·A·保爾森工程與應用科學學院(SEA)的研究人員開發出了最新型的軟體機器人,它可以應用於太空探索、搜索和救援系統、仿生學、醫學手術與康復等領域。
圖片來源:Bertoldi Lab/Harvard SEAS
據外媒New Atlas去年報道,卡羅萊納州立大學和天普大學的工程研究人員開發了受水母啓發的軟機器人。當水母機器人“放鬆”時,圓頂像一個淺碗一樣彎曲。當空氣被泵入通道層時,圓頂迅速彎曲,將水推出並向前推動。
在實驗測試中,水母機器人的平均速度爲每秒53.3毫米。該機器人適用了一種名爲預應力聚合物的技術,使得軟機器人更強大。此項研究發表在《先進材料技術》雜誌上。








