雙足機器人上了天!還會玩滑板走鋼絲
來源:機器人大講堂
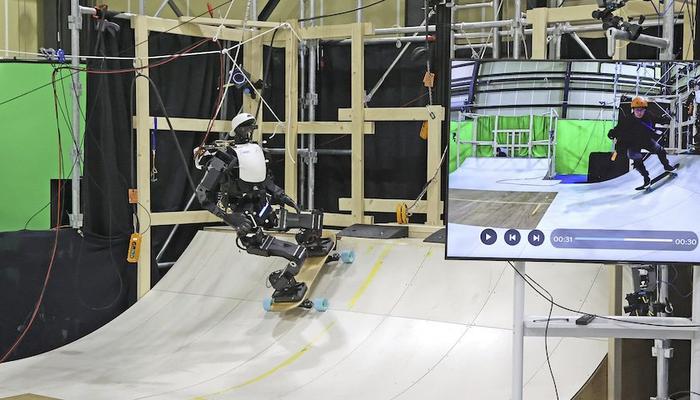
這不是異形,而是一個既可以陸地行走、玩滑板,還可以走鋼絲,平穩飛行的機器人!

美國加州理工學院自主系統和技術中心(CAST)的一個團隊開發出了一款名叫LEONARDO的飛行機器人,機器人結合了雙足行走與飛行兩種運動姿態,使其具有異常的靈活性,能夠進行復雜的運動。


LEONARDO 飛行機器人,全名爲LEgsONboARDdrOne,縮寫又稱 LEO,主要使用多關節機械腿及螺旋槳推進器設計。LEONARDO開發團隊已在線發佈這款機器人的最新論文,同時 LEONARDO也成爲 2021年10月的 Science Robotics的封面照。
論文鏈接:https://www.science.org/doi/10.1126/scirobotics.abf8136
LEO 的重量爲 2.58 公斤,行走時的整體高度爲 75 釐米。它主要由軀幹、螺旋槳推進系統和兩條帶尖腳跟的腿三部分組成。
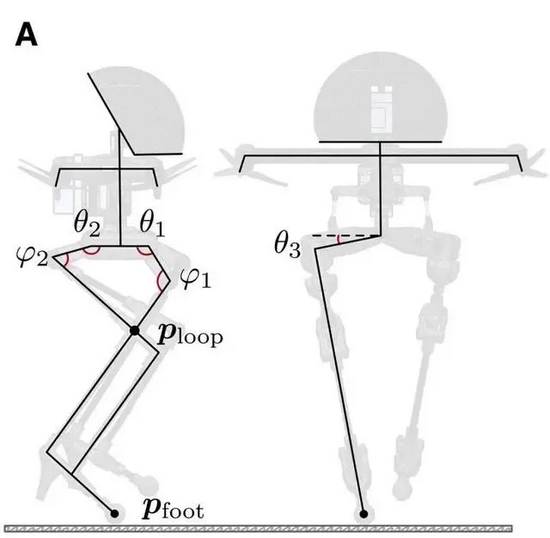
爲了使其足夠輕量化,LEO 的腿部結構採用碳纖維管和 3D 打印碳纖維增強尼龍關節來支撐滾珠軸承。它的兩條腿是對稱的,每條腿都有 3 個伺服電機,一個位於骨盆處,另外兩個位於髖部的前後,三個伺服電機共同控制腿部的運動。
LEO 的肩部安裝有 4 個對稱放置的螺旋槳,用來穩定和控制行走和飛行動作。
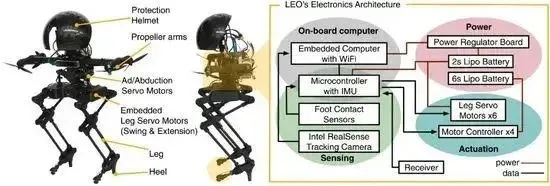
高跟鞋的設計是爲了儘可能減少面積和重量,同時在站立不動的時候能保持穩定:
LEO 可以通過其機載計算機和傳感器套件完全自主運行,根據需要穿越的障礙物類型,它可以選擇使用步行或飛行,或根據需要將兩者混合使用。
LEO靠雙腿和螺旋槳的配合,只要給他一個能站的平面,哪怕是撒上油的易滑平面都能保持穩定。
還具有極高的抗干擾能力,在達 3.8 m/s 的風速下也能保持穩定。
目前,LEO身上背的電池能維持它進行100秒飛行或3.5分鐘行走。
研究人員在論文中談道:“也許最適合 LEO 的應用是那些涉及高空作業的應用,這些工作對人類來說通常是危險的,需要機器人來替代。”
例如,目前高壓線路檢測依靠專業人員來完成,他們不僅要遠距離檢查線路,還要走在線路上進行檢查和維修。利用 LEO 無需再派遣人員爬上電線,只用讓機器人飛到高壓線路上並沿着電線行走來進行檢修工作,這會降低檢修成本,也能夠降低人員墜落傷亡的可能。
除了這些作用之外,爲 LEO 設計的技術還可以促進自適應起落架系統的發展。研究團隊設想,未來的火星旋翼機可以配備腿式起落架,以便它們降落在傾斜或不平坦的地形上時可以保持身體平衡,從而降低在着陸失敗的風險。
LEO的科幻屬性並非偶然。該團隊的靈感來自虛構的飛行人形機器人Astro Boy和由 Gravity Industries 的 Richard Browning 製造的類似鋼鐵俠的噴氣服。然而,該項目的最終目的是從動力學和控制的角度研究步行和飛行的交叉點,並“賦予前所未有的步行能力並解決混合運動帶來的問題”,正如該團隊在視頻中所解釋的那樣。加州理工學院團隊還希望爲複雜地形上的垂直起降 (VTOL) 製造自適應起落架。