原创技术|如何为ABB机器人添加外部轴(导轨)
1、系统key要有外部轴选项,并且用该key做好系统,如下(下图示例为可以添加3个外轴驱动)
2、 打开robotstudio,找到如下界面
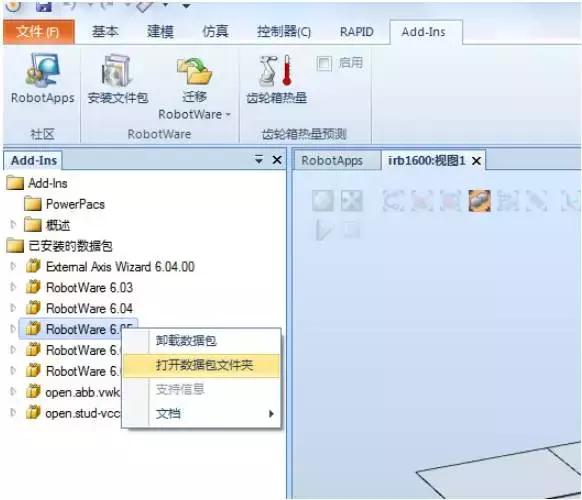
3、 找到如下路径
…\ABB.RobotWare-6.05.0129\RobotPackages\RobotWare_RPK_6.05.0129\\utility\AdditionalAxis\Track
4、出现下图,表示4个驱动柜,通常选择第一个


5、把M7L1B1T_DM1.cfg文件拷贝,放到U盘
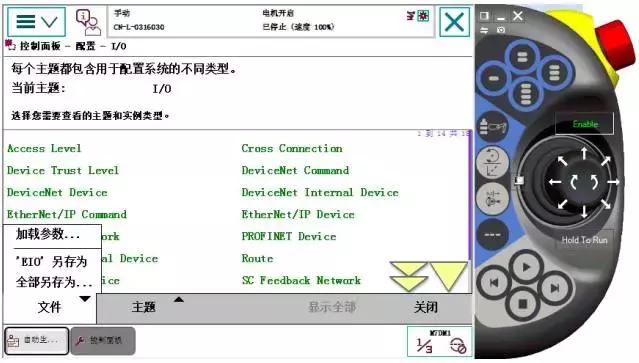
6、示教器控制面板-配置,选择加载参数,然后重启
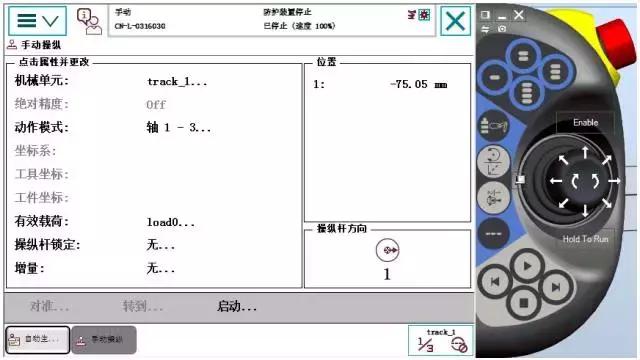
7、重启之后,就可以看到状态栏都了一个外部轴图标
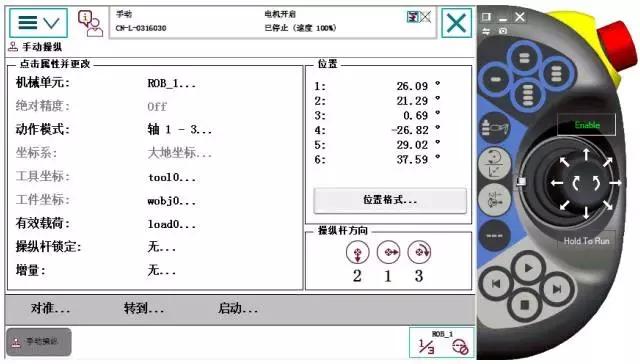
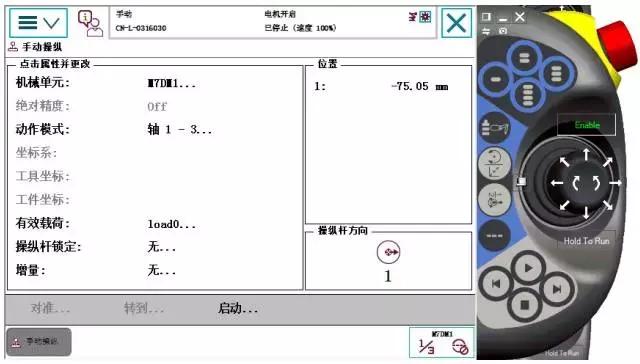
8、切换到外轴,后点击启动,即可以运动外轴
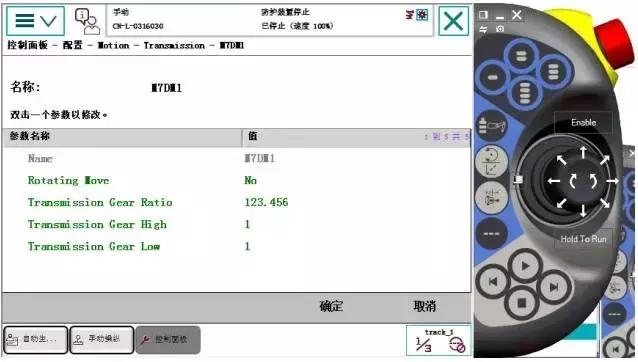
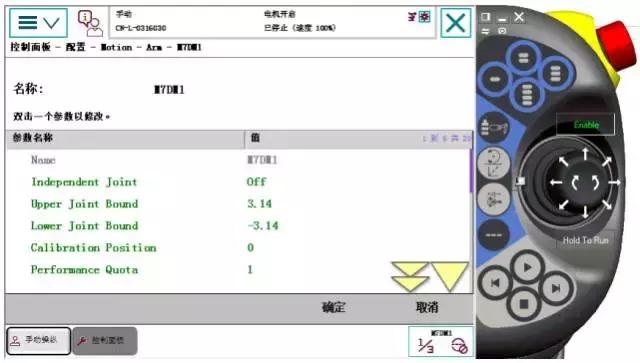
9、在控制面板-配置,主题选择motion里,arm下可以修改外轴上下限,导轨的单位是米
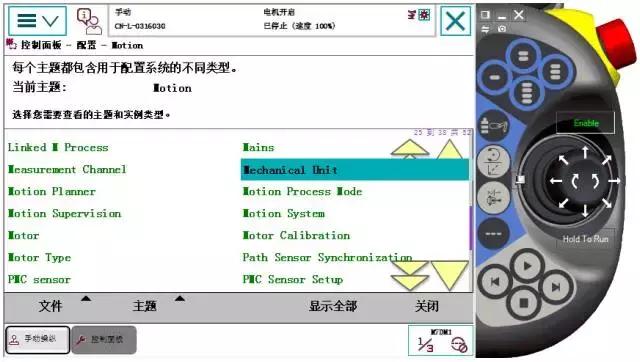
10、Mechanical Unit里可以修改外轴名字
11、修改名字为track_1
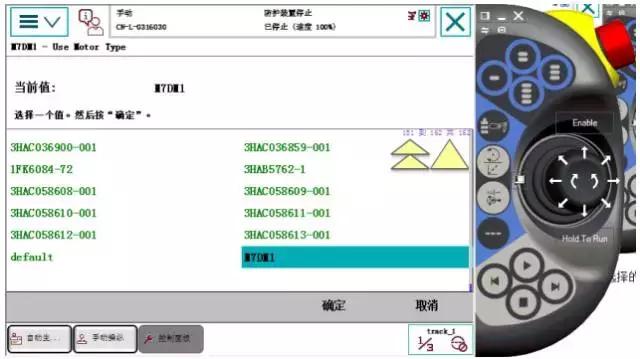
12、在控制面板-配置,主题选择motion里,找到motor,可以修改选择的motor-type
13、在控制面板-配置,主题选择motion里,找到transmission,可以修改减速比