浙大研發世界首個可自愈“機器心臟”,靈感來自蜘蛛心臟,搭配中國傳統桐油
來源: DeepTech深科技
是什麼讓這條軟體機器魚優哉遊哉?
圖 | 軟體機器魚(來源:受訪者)
又是什麼讓這款機器人小車滾滾前行?
圖 | 機器人小車(來源:受訪者)
雖然一個是 “魚”、一個是車,看似風馬牛不相及,但它們有着共同的 “機器心臟”—— 柔性電液泵。

圖 | 柔性電液泵(來源:受訪者)
該“心臟” 由浙江大學機械工程學院鄒俊課題組設計,也是世界首個可通過自身液體自愈的柔性電液泵。
他告訴 DeepTech,研究靈感來自於蜘蛛,其體內含有一套獨特的生物液壓系統,蜘蛛心臟是核心動力部件,通過心臟把血淋巴泵送到腿部,血淋巴的液壓能量、就能轉換爲腿部的敏捷運動。
此外,蜘蛛的自然進化,可讓血淋巴主動對受損組織、或皮膚進行自修復,從而極大提高環境適應力。

圖 | 柔性電液泵的結構、原理以及自愈(來源:受訪者)
鄒俊表示:“一直以來,跑冒滴漏和噪聲問題,是液壓系統的頑疾,這嚴重製約了液壓系統的應用。”
此外,傳統液壓系統由於便攜性差,使用時非常受限。那麼能否研究出一種液壓泵,其功能類似於蜘蛛心臟,既能驅動又能自愈呢?

圖 | 蜘蛛心臟位置(來源:受訪者)
受此啓發,他和團隊研發出這款柔性電液泵,通過電場就能實現介電液的靜音泵送,還可通過在液體中添加自愈因子,實現破損和滲漏區域的自我修復。
4 月 14 日,Nature Communications 報道了這一研究成果,論文標題爲 “Customizing a self-healing soft pump for robot”。其中,浙江大學博士研究生唐威爲論文第一作者,張超副研究員和鄒俊教授爲論文通訊作者。

圖 | 相關論文(來源:受訪者)
當古老的桐油遇見科學
據鄒俊介紹,無需移動部件,柔性電液泵就能實現液體的運動與操控。
其主要構件包括:一個帶有四個圓孔的柔性環電極、兩個帶有四個針的柔性針電極、兩個絕緣電極支架、和一個絕緣彈性體外殼。

圖 | 柔性電液泵的基本結構(來源:受訪者)
研究中他和團隊發現,由柔性硅橡膠材料製成的針孔電極對,可實現電流體的動力輸出,基於此他和團隊設計出了由全柔性材料製作的柔性電液泵。
爲了實現類似蜘蛛血液的自愈功能,他改進了柔性電液泵泵送的電響應介電液體,並在其中均勻融入桐油液體。
這樣可讓電響應介電液體、蛻變成一種可修復破損硅膠外殼的自愈性液體,從而實現液體泵送和自我修復的雙重功能。

圖 | 戳破外殼來進行自愈能力檢測(來源:受訪者)
其中,中國古人就在使用的桐油,在研究中起到了重要作用。
桐油是一種乾性油,它由氧鍵脂肪羧酸殘基和活性共軛碳 - 碳雙鍵組成,因此具有優良的固化性能,其在空氣中會固化成膜,並可用於修復受損的柔性材料。
因此,基於桐油改進後的功能液體,不僅具備電流體的驅動性能,又具備桐油的修復功能,柔性材料再也無懼損壞。

圖 | 被戳破後的流體具備自愈功能(來源:受訪者)
改進後的功能液體,全名叫癸二酸二丁酯 - 桐油溶液,裏面均勻地溶解着桐油。

圖 | 柔性電液泵自愈液體治療損傷的示意圖(來源:受訪者)
當桐油暴露在空氣中時,由於活性共軛碳 - 碳雙鍵很容易和氧氣結合,因此會被和氧連接的脂肪羧酸殘基吸收,從而引發均聚反應,最終會形成固體膜。
當柔性材料受到損傷時,泵內自愈液會暴露在空氣中,凝固後即可自動修復損傷。修復完成後,泵不僅能恢復正常工作,而且不發生任何泄漏。

圖 | 功能性液體的自愈能力(來源:受訪者)
同時,受損後的自愈材料,其原來的特徵也可得到保留。
具體來說,在 20℃ 時,自愈膜的儲能模量爲~14.3kpa,在 25℃ 時爲~13.2kpa,在 30℃ 時爲~10.6kpa。
在以上三種溫度下,自愈膜的損耗模量分別爲−3.1 kPa、−2.5 kPa 和−2.1 kPa。由此可見,能量損失非常少。

圖 | 自愈膜的儲能模量及損耗模量測試(來源:受訪者)
爲了進一步驗證自愈膜、和硅橡膠膜之間的粘附性能,鄒俊對這兩種膜進行了重複拉伸試驗。
把硅橡膠膜以每次 20% 的應變、重複拉伸 200 次後發現,硅橡膠膜與自愈膜仍能牢固地粘結在一起,這說明它們之間具有良好的粘結性能。
圖 | 自愈膜與硅橡膠膜的粘接拉伸測試(來源:受訪者)
但溫度對自愈時間有着明顯影響,同樣受損情況下,35℃ 環境中完全自愈耗時約 6 小時,24℃ 環境中自愈耗時約 1 天。
修復後的流體動力系統,能連續工作 2 小時,而且全程無泄漏,這證明了該自愈方法的有效性和可靠性。
不過,這種自愈只能在空氣中實現,而無法在水中實現,因爲水中缺乏與空氣的接觸。

圖 | 自愈過程(來源:受訪者)
就柔性電液泵的工作步驟來說,當泵內充滿功能液體時,在柔性針孔電極的電場作用下,針孔之間可以產生射流,以便實現泵送功能。

圖 | 柔性針孔電極對之間產生強大的射流(來源:受訪者)
由於柔性針電極、位於柔性孔電極兩側,通過電路的切換,柔性電液泵能快速實現流體的正反向流動,從而變成一個高度可控的雙向變量液壓泵。

圖 | 用柔性電液泵在兩個圓柱形儲罐之間泵液體(來源:受訪者)
其工作原理是,在正極和接地電極之間的強烈、且不均勻電場作用下,針電極附近少量中性液體分子中的電子,被剝離變成正離子。
在庫侖力(一種物理學定律)的作用下,這些自由的正離子、從針電極快速移動到孔電極,並拖動大量的中性液體分子、與之一起流過孔電極,從而形成強大的射流。
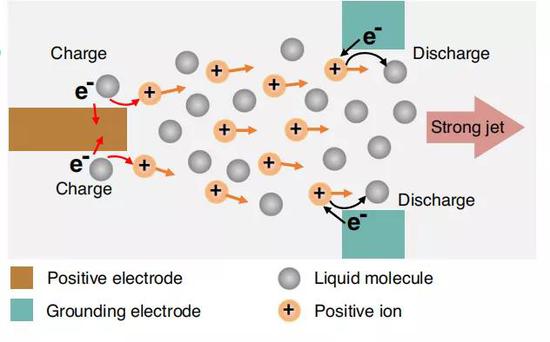
圖 | 柔性電液泵的工作原理(來源:受訪者)
當正離子到達孔電極時,正離子在接地的孔電極上放電,重新變成中性液體分子。在通電情況下,這些過程會持續進行,泵內液體也會一直流動。除非切斷電流,流動纔會停止。
此外,鄒俊還對柔性電液泵進行了理論建模,並用仿真軟件 COMSOL Multiphysics 進行了數值模擬。

圖 | 柔性電液泵帶來的動力(來源:受訪者)
爲了匹配柔性電液泵,他們還自主設計出一款小型驅動電路板,該電路板使用電池、或無線電力傳輸系統作爲動力,它能讓柔性電液泵實現雙向可逆泵送。
結合小型驅動電路板,柔性電液泵可嵌入不同的液壓動力系統和機器人系統,從而讓前文的軟體機器魚和機器人小車實現無束縛運動,這也是無束縛軟體機器人中的巨大進步。

圖 | 柔性電液泵的數值模擬結果(來源:受訪者)
可實現液壓系統的 “私人訂製”
實際應用中,就電液泵的外貌和泵送能力來說,不同液壓動力系統的需求,也各不相同。慶幸的是,柔性電液泵的尺寸和形狀,可根據具體需要進行定製。
泵的尺寸可大可小,爲的是可以匹配不同尺度的機器人系統。此外,柔性電液泵的外殼和電極配置的設計空間很大,比如可以設計成圓柱形、三角形、五角形和模仿心臟外形等。

圖 | 各種尺寸及形貌的柔性電液泵(來源:受訪者)
另外,柔性電液泵通過針孔電極對產生流動,產生的流量與壓力較大,並且它由輕量化的柔性材料製成,質量也比較輕。
相比同尺寸的傳統剛性泵,在同樣重量下,這種泵能產生更大的輸出流量和壓力,同時具備較好的可攜帶性。
在可控性上,柔性電液泵爲一種電控泵,只需結合驅動電路板,就可實現快速雙向可逆控制。
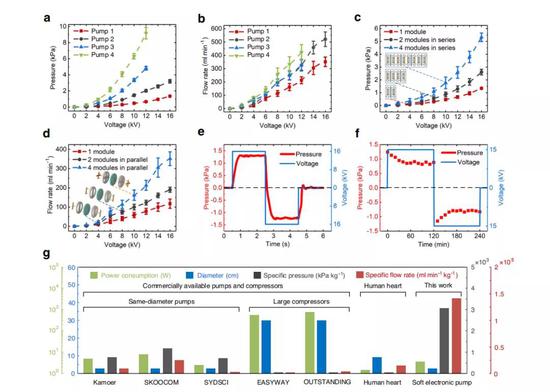
圖 | 柔性電液泵的泵送性能及性能對比(來源:受訪者)
在驅動上,它可實現靜音驅動,因爲它不含可移動部件,因此驅動時既沒有聲音、也沒有振動。
當然最重要的,是柔性電液泵的自愈能力,一旦柔性材料能實現自我修補,就能給相關設備節約製造成本。
不過鄒俊也坦言,目前的柔性液壓泵只是初期版本,在驅動能力、製作方式和響應速度上,還有較大提升空間。
其還表示:“該研究爲液壓系統的靜音驅動和自修復,提供了新型解決方案,有望大幅提升液壓系統的環境自適應能力,同時也爲穿戴式裝備的無繩驅動,提供了新思路。”




