85后安徽青年给“天问一号”造眼睛,让航天器度过火星着陆黑色九分钟
来源:DeepTech深科技
他叫朱飞虎,是给航天器造“眼睛”的人。

图 | 朱飞虎的照片(来源:朱飞虎)
2021 年5 月 15 日,中国首款自主研发火星探测器“天问一号”,在火星成功完成软着陆,这是中国第一次真正意义上的深空之旅,这意味着中国的火星探测能力直追美国,并成为首个利用单个探测器一次性完成“环绕+着陆+巡视”等任务的国家。
其中,火星着陆多功能避障敏感器(下称“避障器”)承担着重要作用,而它正是那双“眼睛”。
朱飞虎表示,其担任“天问一号”火星着陆多功能避障敏感器的主任设计师,并率领团队于 2015 年着手研究避障器,2019 年 4 月将产品交付给整星,2020 年 7 月它跟随“天问一号”探测器于发射入轨,后于 2021 年 5 月成功着陆火星乌托邦平原。
中国国家航天局对此评价称:“着陆点附近地势平坦,石块丰度和尺寸与预期一致,表明着陆点自主选择和悬停避障实施效果良好。”朱飞虎也因此获得2021达摩院青橙奖,也成为该奖项设立以来的首位航天科学家得主。
让“天问一号”度过火星着陆的“黑色9分钟”
这双“眼睛”让“天问一号”度过了火星着陆的“黑色 9 分钟”,以稳稳的姿势降落在乌托邦平原。作为国际航天领域中最困难、失败率最高的任务,火星软着陆的成功率不到 50%。
火星距地球远达 4 亿公里,无法进行实时通信,因此在“天问一号”着陆火星的 9 分钟里,工作人员无法进行地面干预,只能依靠探测器进行自主控制。由此可见火星着陆之难,历史上许多国家都曾参与,但只有中美两国完成了这一过程。
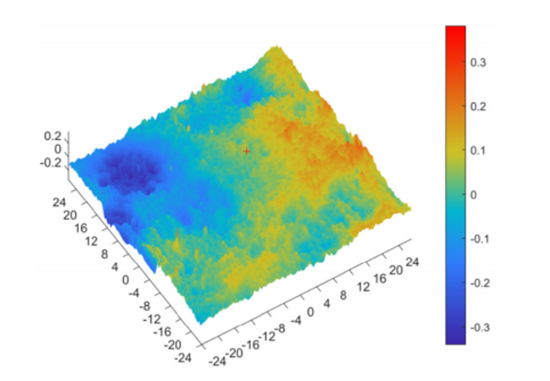
图 | 激光精避障,水平 6.2m,垂直 4m(来源:朱飞虎)
据朱飞虎介绍,NASA 一般采取如下两种着陆方式:其一是气囊着陆方式,利用打开的气囊进行缓冲,借此来保护着陆车。其二是天空起重机方式,NASA 的好奇号火星探测器和新一代火星车毅力号均用此进行着陆。相比之下,我们选择了软着陆,这也是和中国探月工程相似的着陆方式。
对比 NASA 的着陆方式,软着陆的不同主要有二:其一是大气伞降,借助大气空气动力学让速度降到较低水平。其二是抛掉探测器大底,露出视觉系统来做精确导航,这时再打开缓冲 7500 牛发动机,以进行动力减速,以便在伞降过程实现精确可控的减速。
在动力下降期间,探测器距离着陆地越来越近,当相距仅有 10 公里时,探测器要执行精确导航,这时需要一双“视力精准”的“眼睛”即多功能避障敏感器。
在用于“天问一号”探测器时,多功能避障敏感器主要有三大主要任务:首先,它要借助视觉系统光学成像模块去规避背罩,当探测器抛完大底,降落伞和背罩会携伴脱离探测器,它俩在脱离时的落点不能重复,否则会导致撞车现象。
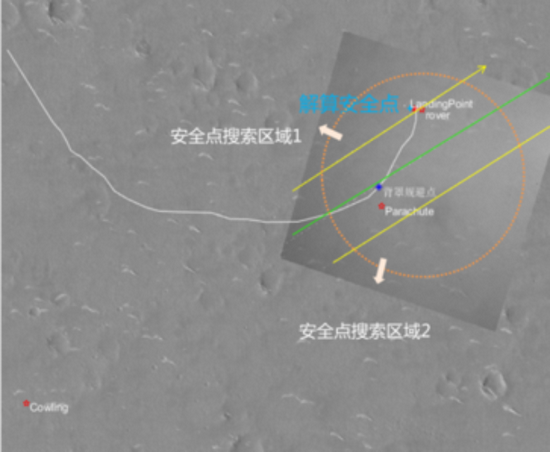
图 | 背罩规避与光学避障(来源:朱飞虎)
其次,利用视觉系统形成的初步避障,可让着陆避开大型岩石、较大的陨石坑,从而保证祝融号火星车顺利行走。再次,祝融号火星车的着陆腿比较细,一旦落在岩石或陨石坑上有可能会翻车。
在距离着陆地 100 米时,凭借多功能避障敏感器的激光三维成像,探测器可执行悬停避障动作,从而规避尺度小于 0.2m 的小型岩石和陨石坑,借此进行精避障,以防止火星车落到岩石和陨石坑上。

图 | 整器悬停避障试验(来源:朱飞虎)
具体来说,光学成像模块和激光成像模块是多功能避障敏感器的两大组成部分。它们主要承担以下角色:第一,探测器背后的降落伞及金属结构,它的别名叫背罩。由于背罩很大,假如探测器着陆点离它太近,背罩可能会缠住火星车,因此要设法做以规避。
第二,大型岩石和陨石坑也是被规避的对象。当探测器距离着陆点在3000米至10000米时,它要对障碍进行粗略识别,并规避半径在百米级至公里级之间的大型障碍。而在火星着陆九分钟中,着陆腿会在最后三分钟伸出防热大底,这时多功能避障敏感器也要识别火星表面的障碍。
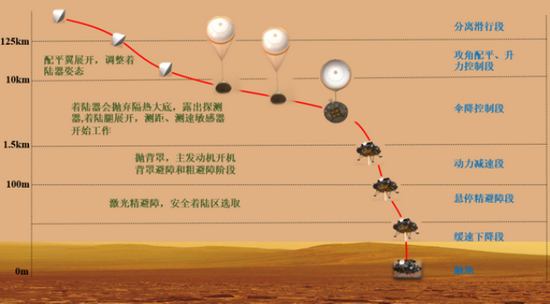
图 | “天问一号”着陆点自主选择系统(来源:朱飞虎)
当探测器距离着陆地仅有一百米时,激光成像模块可执行更高精度的障碍规避,被规避对象是尺寸小于 0.2 米的石头和陨石坑,借此让火星车落到更平坦的地方,以防止其后续行为受限。概括来说,多功能避障敏感器的看家本领是给火星车选择平坦的着陆区域。
月球车巡视和空间交会
视觉系统也可用于月球车巡视和空间交会上。当月球车在巡视时,视觉系统可帮它识别周围地形地貌,从而做出精确规划。月球车上还会搭载导航相机和避障相机,它和探测器的着陆相机有诸多相似之处,通过呈现立体三维图像,让行走中的月球车可以辨别并避开车轮边的障碍,比如石子和凹坑等。
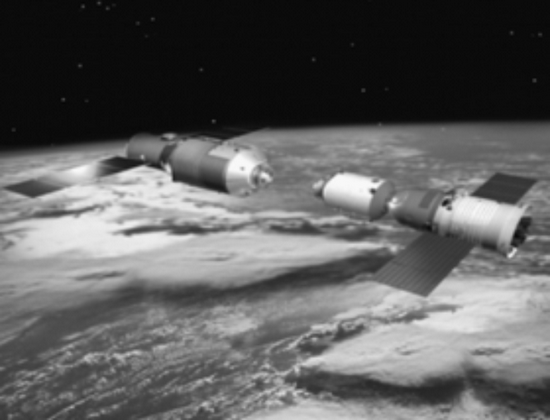
图 | 交会对接(来源:朱飞虎)
在航天器交会对接上,还要进行相对位置测量和姿态测量,当两者接近时,不仅要完全对上相对位置,还要保证姿态配对,即只有面对面时才能成功对接。而对接精度的要求也很高,一般在毫米量级,角度要求则在零点几度量级。
朱飞虎表示,视觉系统曾成功应用于天舟三号,在使用时它全面继承了避障器系统的硬件,同时也对软件做了迭代,以保证交会对接任务的顺利完成。
在软件上,他设计的着陆点自主选择视觉导航算法,具备实时、鲁棒等优点,让“天问一号”的成功软着陆获得更多保障。
据悉,该算法采用双目视觉算法硬件化的方式,并用FPGA加以实现,具备太阳高度角变化,自适应调整阴影和方差特征等能力。此外,他还建立了噪声模型,让以数字化地形、进行全工况模拟成为现实。未来,在“天舟四号”以及后续神舟系列飞船上都会用到。
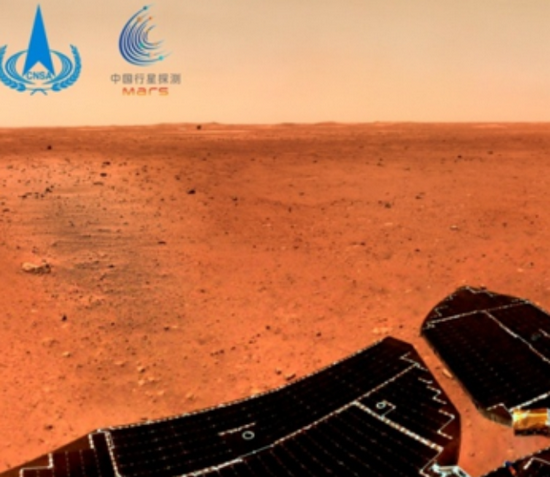
此外,朱飞虎团队参与研发的同类视觉产品——导航相机和避障相机,也已应用在祝融号火星车上。2021 年 5 月,祝融号火星车的拍摄影像公布,无论是彩色图像、还是黑白避障图像,均由导航相机和避障相机拍摄完成。嫦娥五号交会对接光学成像敏感器(下称“敏感器”),则是朱飞虎团队研发的另一款“眼睛”。2020 年底,中国首次月球采样返回 1731g 月壤。
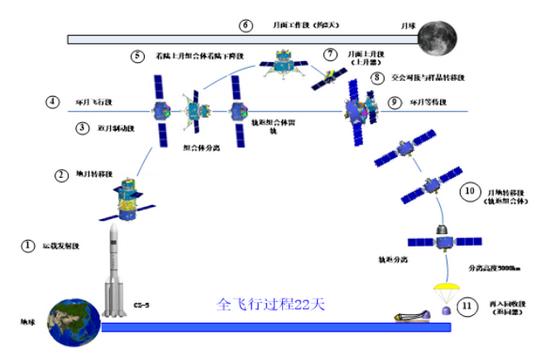
图 | 嫦娥五号交会对接成像敏感器相关示意图(来源:朱飞虎)
当上升器与轨道器交会时,敏感器保障了 150m 的对接、以及平移靠拢段的进行,这一步也被称为“千里穿针最后一步”,精度最高、难度最大,作为唯一的“眼睛”,敏感器作用之大不言而喻。
另一方面,朱飞虎带领的空间激光类产品研制团队也已成长起来,该队伍也将在实施小天体探测任务、探月四期任务、空间站任务等重大航天任务承担基石作用。
不过他也表示,相比国外同类产品,国内避障器的主要不足分别来自视觉和激光两方面。无论是视觉,还是激光,性能的提升主要受限于探测器芯片,而只有好芯片才能带来高性能。和国产芯片厂商交流之后他发现,相比国外先进传感器的指标,国内传感器仍有一定差距。而在激光器上,虽说中国激光器的晶体材料已处于全球领先地位,但在激光器件的集成上,仍和国外有一定差距。
三步走:继续深耕光电导航
朱飞虎是安徽安庆人,生于 1986 年,本科毕业于哈工大,后在清华获得博士学位。9 岁时,他就开始阅读天文学书籍,再加上爸妈都是理工科背景出身的教师,打小就给他讲天文学故事,航天的“种子”早已播撒在心间。本科时,其就读于哈尔滨工业大学,博士毕业于清华大学,期间一直学习电子科学与技术专业。
如今,他就职于北京控制工程研究所空间智能控制技术国家级重点实验室,主要负责 GNC 分系统抓总单位,并承担了 80% 以上的任务。截至目前,朱飞虎已发表论文 10 余篇,申请专利 20 余项,授权 11 项,并被评为航天五院青年拔尖人才、北京市科技新星候选人、北京控制工程研究所科技创新一等奖。
2024 年,中国即将发射小天体,这将是中国首次小行星探测任务,未来他也将担任重要载荷与导航单机探测激光测绘导航系统负责人。
他表示,自己将继续践行航天精神,不断深耕光电导航领域,具体分为三方面:其一是深入深空探测工程,从科学层面扩展人类认知;其二是参与北斗导航工程和卫星互联网工程,从社会层面服务于老百姓的生活;其三是将最先进的光电导航技术应用于航天装备上,提升航天装备的智能化控制水平。
与此同时,中国航天并不是一个封闭的系统,也在日益走向开放。在小行星探测上,其团队正和德国马普所合作。小行星探测任务属于科研探索项目,可能涉及小行星演化、生命起源等科学问题,相对来说比较开放。
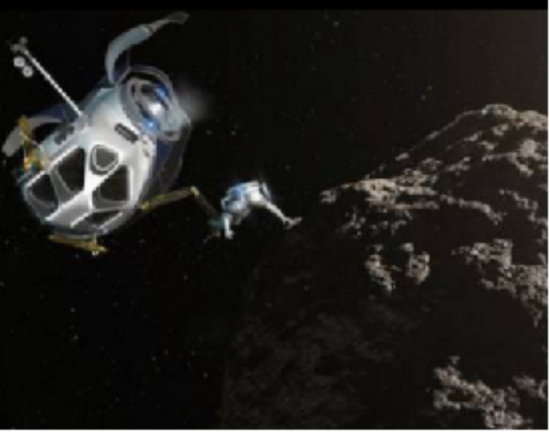
图 | 小行星探测(来源:朱飞虎)
因此在小行星探测任务中,朱飞虎团队这边也可开放载荷给国外同行,在数据处理上也可跟对方进行合作。在更加大众的业界应用上,朱飞虎团队依靠轩宇空间科技公司平台,将视觉导航系统扩展应用于民用领域,有望在自动驾驶领域发挥重要作用。







