被問爲啥不學中國探月這個操作 印度航天負責人:沒錢
來源:觀察者網
4年前野心勃勃的“月船2號”登月計劃失利後,印度本月14日即將迎來“月船3號”月球探測器的發射。印度空間研究組織(ISRO)主席索馬納坦(S。 Somanath)日前接受採訪,解釋此次任務將做出哪些改進。
值得一提的是,當被問及爲何不像中國那樣在計劃之初預留備份探測器以備不時之需時,索馬納坦直言,經歷“月船2號”失聯並墜毀後,印度航天機構不得不保持較低的任務成本,以延續該項目的研究。
“月船3號”如果成功,將使印度成爲繼蘇聯/俄羅斯、美國和中國之後第四個實現月球軟着陸的國家。但索馬納坦同時承認,印度很多後續航天項目計劃會取決於“月船3號”的成功與否,“如果你繼續失敗,就沒有人會給你下一個任務”。

索馬納坦接受採訪視頻截圖
據ISRO官網介紹,“月船3號”由推進艙與着陸器-漫遊車複合體兩部分組成,在三級火箭將把“月船3號”送入約170公里×36500公里的橢圓停泊軌道後,推進艙將把複合體送入距離月球表面約100公里的圓形軌道。
着陸器“維克拉姆”(Vikram)重量爲1.752噸,其中包含一個重26公斤、名爲“智慧”(Pragyan)的六輪機器人月球漫遊車。計劃是在月球南極實現“軟着陸”後,着陸器-漫遊車複合體將實現分離,在14天內各自完成相關科研任務。
着陸器攜帶的載荷可測量月球表面附近的離子和電子密度、月表溫度,掃描月震、描繪月球地殼地幔結構,並研究月球系統動力學;漫遊車所攜帶的光譜儀將進行月球地質分析。如果成功,這將是人類首次對月球兩極環境進行分析。
在10日發佈的與印度自媒體Gareeb Scientist的採訪中,索馬納坦表示,爲首先保證順利着陸,“月船3號”較“月船2號”減少了一臺着陸器發動機至四臺。該發動機原本是設計用於避免着陸時揚起的月塵覆蓋傳感器,但這會影響着陸成功率,後來的縮小模型模擬測試也顯示,月塵不會造成太大問題。

“月船3號”月球探測器。圖片來源:《印度快報》
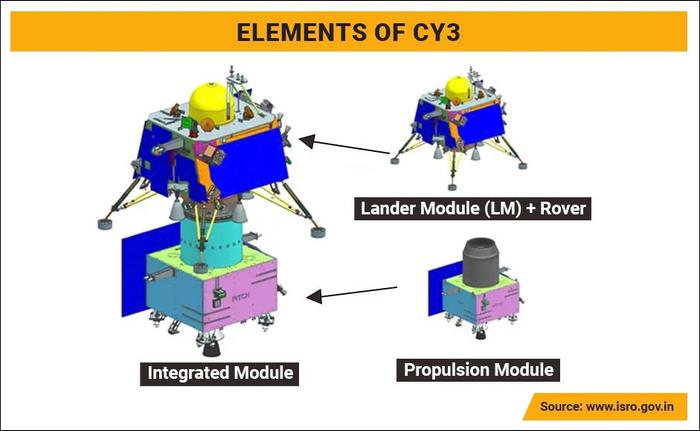
“月船3號”着陸器-漫遊車複合體圖示。圖片來源:ISRO
儘管少了一臺發動機,但此次探測器質量仍然增加的主要原因在於,着陸器攜帶了更多燃料。此外,它還額外增配了一臺相機,以幫助着陸器在下降過程中避開障礙物。“月船3號”還加固了着陸腿,改進了軟着陸序列,爲在預定地點以外區域的着陸做準備。
爲了保證無論着陸後的方向如何,着陸器仍能與控制中心進行通信,ISRO給着陸器安裝了更多通信天線。索馬納坦說,這一方面提高了數據傳輸速率,也增加了整體重量。不過,畫面傳輸等仍將有一定的延遲。除此以外,漫遊車裝配的太陽能電板所蓄電量也更高。
索馬納坦透露,“月船2號”任務時,原本打算給着陸器配置進口的激光多普勒測速儀,但因爲無法及時從國外採購到而放棄。此後,ISRO的光電系統實驗室和衛星中心決定自行開發,目前“月船3號”已配備了印度自研的激光多普勒測速儀。
在經費上,“月船3號”比“月船2號”要“經濟”許多。此前報道顯示,“月船2號”探測任務總成本爲97.8億盧比(約合1.42億美元),其中探測器成本爲60.3億盧比(約合8743萬美元),發射成本爲37.5億盧比(約合5437萬美元);而“月船3號”的總成本爲61.5億盧比(約合7500萬美元),這主要是因爲探測器成本大幅減少至25億盧比(約合3000萬美元)。
索馬納坦似乎也並不諱言這個問題。在40多分鐘的採訪中,Gareeb Scientist問及印度爲何不像中國那樣預留備份探測器,這樣既可在先導任務失敗時接替工作,也可在先導任務成功後執行進一步任務。此前,原本是嫦娥三號“備份星”的嫦娥四號經過技術改造後,就實現了人類首次月球背面軟着陸和巡視勘察的突破。
對此,索馬納坦直言,在“月船2號”失利後,印度的探月項目受到成本限制。“如果成本過高,我們不會被允許繼續做研究。”他表示,因此“月船3號”最大化聚焦於着陸成功,不僅在測試中將模型最小化,也不會生產太多備用硬件,“如果你再多生產一個,成本就會增加,這對我們來說是一個很大的問題”。
索馬納坦透露,除了與日本合作的“月球極地探索”(LUPEX)項目外,ISRO也在關注金星探測、系外行星研究等問題,但都不確定。他承認,印度很多後續航天項目計劃會取決於“月船3號”的成功與否,“如果你繼續失敗,就沒有人會給你下一個任務”。
2019年9月,印度“月船2號”探測器攜帶的着陸器“維克拉姆”與軌道器成功分離,開始朝月球表面飛行,但幾天後“維克拉姆”在嘗試登月時突然失聯。11月,印度官方公佈報告正式宣佈,由於制動出現問題,“維克拉姆”號在月球表面“硬着陸”並墜毀。不過,其軌道器仍停留在月球軌道,所以“月船3號”並不包含軌道器部分。
“月船3號”定於印度時間7月14日下午2時35分從薩蒂什·達萬太空中心發射,預計將於8月23日或8月24日着陸月球。如果“月船3號”能在月球表面成功“軟着陸”,印度將成爲繼蘇聯/俄羅斯、美國和中國之後第四個實現此壯舉的國家。








