張虎:功率級/機械級半實物在環測試系統在商用車開發中的應用
2024年3月26日-28日,2024中國商用車論壇在湖北省十堰市舉辦。本屆論壇由中國汽車工業協會主辦,以“新步伐•新成效•新提高,助力商用車產業高質量發展”爲主題,基於行業高質量發展要求、國家“雙碳”目標實現、汽車產業轉型和創新需要,以創新促改革、促轉型、促發展,助力商用車產業高質量發展。其中,在3月28日下午舉辦的“主題論壇六:新產品、新技術助力商用車供應鏈創新發展”上,蘇州英特模科技股份有限公司研發部總工張虎發表精彩演講。以下內容爲現場發言實錄:

各位領導嘉賓下午好,我來自蘇州英特模,蘇州英特模是一家做測試服務和測試裝備的公司。剛纔很多嘉賓都講到供應鏈,我總結一下大家對供應鏈的訴求,第一個是自主可控,我們英特模的半實物在環測試解決方案是自主研發的,包括其中最關鍵的主控軟件和高精度高動態的加載臺架。對供應鏈的第二個訴求就是降本增效,我們在研發新產品,新技術的時候,這個研發的投入是非常高的,特別是現在低碳動力、智能網聯,智能底盤,智能座艙等各種新技術層出不窮。因此,一方面要提高研發效率,研發效率我們希望在很多時候,在只有零部件的狀態下,或者只有個別零部件的狀態下,就可以完成針對整車工況的一些功能、性能測試評價和匹配優化,把問題發現在前面,這樣去提高研發效率。第二個方面,需要降低成本,如果企業在面對一些創新的、緊急的研發測試需求時,可以不自己建設臺架,由我們英特模這樣的第三方機構提供研發測試服務給企業。
下面引入正題,今天我彙報的題目是功率級/機械級半實物在環測試系統在商用車開發中的應用。首先,爲什麼要用這個半實物在環測試系統,同時它是一個什麼樣的系統?
大家在零部件或者控制器開發過程中,我們經常會遇到這樣一些問題,比如說我有一款發動機已經開發好了,我希望知道這款發動機匹配不同變速箱,匹配不同車輛的時候,整車的動力性,經濟性,排放怎麼樣?也就是,在只有零部件,沒有整車的條件下,怎麼樣去提前評估零部件在整車狀態下的一個表現,這是一個要解決的問題。
還有一個問題,比如說我的發動機和變速箱已經研發好了,但是發動機和變速箱的很多控制,是要雙方協調的。發動機和變速箱是動力域內的協調控制,現在動力域、底盤域和智駕域,跨域之間也有很多需要互相協調控制的場景。現在的解決辦法是這些零部件和總成上車後再一起做聯合調試和聯合標定,問題只能在上車後暴露和解決,影響開發週期。因此,在只有零部件和總成,沒有整車的條件下,能不能對其控制策略以及性能做提前的測試評估和匹配優化,也是一個問題。
還有一個問題,就是很多複雜的功能,如果我們需要整車在道路上做測,由於很多外部環境因素不可控,不可重複,其實是效率很低的,比如說混合動力模式切換控制。同時,針對極端工況,失效工況,在道路上做測試本身就面臨一個安全問題,特別是智能駕駛。
面對上述我們開發中的問題,對我們測試系統來講,就是要實現兩個功能。第一,在只有真實零部件的狀態下,我們在實驗室環境裏面創造一個外部環境,讓零部件能夠像運行在整車環境下一樣。第二,我們在實驗室環境裏面,高效、安全地創造複雜功能和失效模式的激活條件,創造極端工況,同時讓它工作在我們創造的這個環境裏面。如果這兩個功能可以實現,就可以解決我們剛纔講到的開發中遇到的一些問題。
我們怎麼做呢?其實就是我們這裏面講的半實物在環仿真測試系統,英文簡稱X-in-the-loop test system。這裏X是被測對象,可以是發動機,可以是燃料電池,也可以是一輛整車,loop就是包括X在內的整個測試系統。X-in-the-loop的核心是虛擬和真實結合,X是真實的,loop內除了X以外的部分,也就是被測件的外部環境是模擬的。通過把真實的被測件實物和模擬的外部環境,構成一個虛實結合的“整車”,就可以實現下述兩點:第一,在只有真實零部件和總成(也就是被測件)的條件下,對被測件進行一個整車運行條件下的測試和驗證,不斷的把測試前移;第二,被測環境是模擬的,因此是可控的,重複性好的,同時也非常容易實現複雜、極端和失效工況的模擬,提高我們研發和測試的效率和安全性。
接下來,介紹半實物在環測試系統的應用實踐。
半實物在環仿真測試系統,可以應用在各個零部件和總成的測試中,可以是發動機,燃料電池發動機,驅動電機,電池,熱管理系統,底盤系統,智駕系統,也可以是多個系統的組合。下面我會以驅動電機爲例,介紹不同層級的半實物在環測試系統。
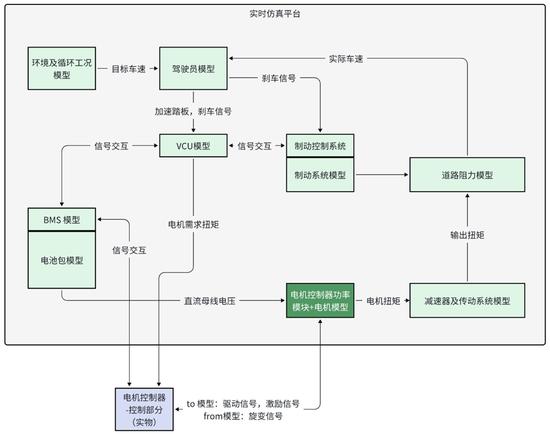
首先,是驅動電機控制器的信號級在環測試系統。這裏面被測件是電機控制器的控制部分,即不包含功率模塊。測試內容包括控制器信號級硬件輸入輸出測試,驅動電機控制器信號級功能測試(包括故障注入等),以及驅動電機在整車運行工況下的控制(例如電池包低溫)。爲了實現上述測試內容,將駕駛員,環境,以及車輛中的VCU,電池包及其BMS,電機控制器功率模塊和電機本體,減速器及傳動系統,制動系統及其控制器,道路阻力等進行仿真建模,將構建的虛擬模型與真實的電機控制器控制部分集成,從而建成驅動電機控制器的信號級在環測試系統。這裏,虛擬模型和真實被測件之間,通過信號級I/O和通訊實現連接。
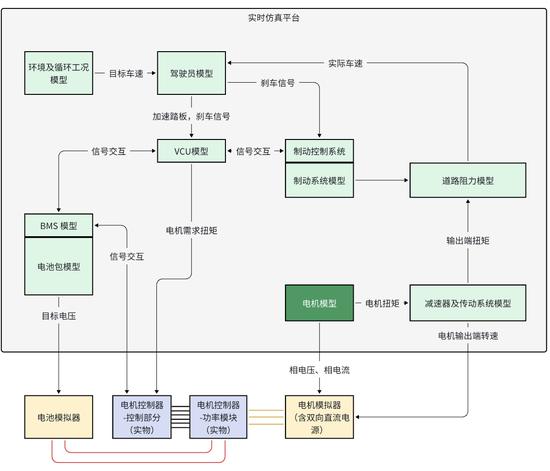
接着,如果電機控制器的功率模塊也已經具備,被測件就是完整的電機控制器。這裏測試內容包括控制器功率級硬件輸入輸出測試,驅動電機控制器功率級功能測試(包括故障注入等),以及驅動電機在整車運行工況下的控制(例如電池包低溫)。爲了實現上述測試內容,將駕駛員,環境,以及車輛中的VCU,電池包及其BMS,電機本體,減速器及傳動系統,制動系統及其控制器,道路阻力等進行仿真建模,將構建的虛擬模型與真實的電機控制器集成,即可建成驅動電機控制器的功率級在環測試系統。這裏,虛擬模型和真實被測件之間,除了信號級I/O、通訊之外,還需要功率加載設備(這裏是電池模擬器和電機模擬器)實現兩者之間的連接。
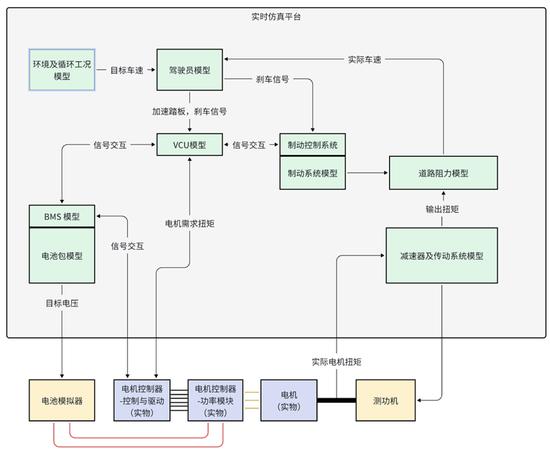
再進一步,電機本體已經制造完了,這時被測件就是完整的驅動電機。這裏測試內容包括驅動電機的功能測試、性能測試、耐久測試,以及該電機匹配整車後在整車工況下的性能測試評估和匹配優化。爲了實現上述測試內容,將駕駛員,環境,以及車輛中的VCU,電池包及其BMS,減速器及傳動系統,制動系統及其控制器,道路阻力等進行仿真建模,將構建的虛擬模型與真實的電機集成,即可建成驅動電機的機械級在環測試系統。這裏,虛擬模型和真實被測件之間,除了信號級I/O、通訊之外,還需要功率加載設備(這裏是電池模擬器)和機械加載設備(這裏是測功機)實現兩者之間的連接。
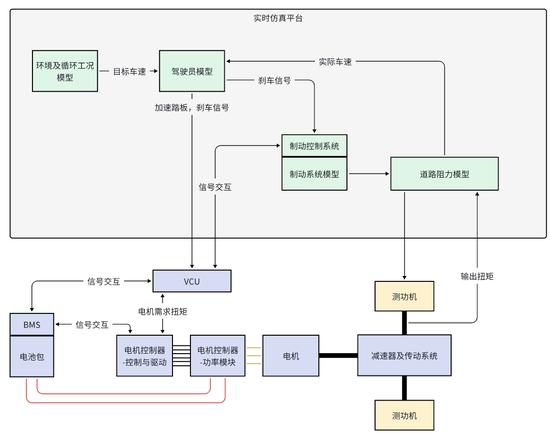
更進一步,驅動電機及其減速器、傳動系統,電池包及其BMS,VCU等都已經初步完成開發。這裏希望完成的測試內容,包括驅動電機控制器與BMS和VCU的聯合調試和匹配,以及進一步對被測總成在整車狀態下性能進行測試評估和匹配優化。爲了實現上述測試內容,這裏只需要對駕駛員,環境,制動系統及其控制器和道路阻力等進行仿真建模,將構建的虛擬模型與真實的驅動電機及其減速器、傳動系統,電池包及其BMS,VCU集成,即可建成動力域的機械級多電聯調測試系統。這裏,虛擬模型和真實被測件之間,除了信號級I/O、通訊之外,還需要機械加載設備(這裏是輪邊測功機)實現兩者之間的連接。
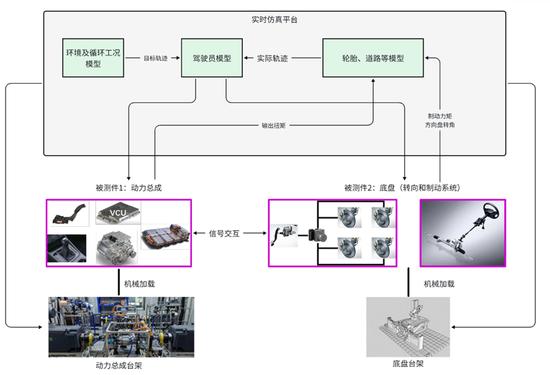
再進一步,如果動力總成和底盤域的轉向、制動系統都初步完成了開發,這裏希望完成的測試內容,包括動力域和底盤域的聯合調試和匹配,以及進一步動力總成和底盤在整車狀態下的性能進行測試評估和匹配優化,特別是需要動力域和底盤域互相協調控制的場景。例如,車輛轉向的時候,可以通過控制轉向系統,改變車輪轉角,來控制車輛橫向運動狀態,這是底盤域的範疇;也可以控制左右車輪的輪端扭矩,或者前後車軸的扭矩分配等,來控制車輛橫向運動狀態,這是動力域的範疇。這裏需要對駕駛員,環境,輪胎和道路等進行仿真建模,將構建的虛擬模型與真實的動力總成和底盤集成,即可建成動力底盤在環測試系統。該動力底盤在環測試系統,除了實現動力總成和底盤的聯合測試,也可以實現動力總成和底盤的單獨測試。這裏,虛擬模型和真實被測件之間,除了信號級I/O、通訊之外,同樣需要機械加載設備(這裏是輪邊測功機,轉向負載模擬系統等)實現兩者之間的連接。
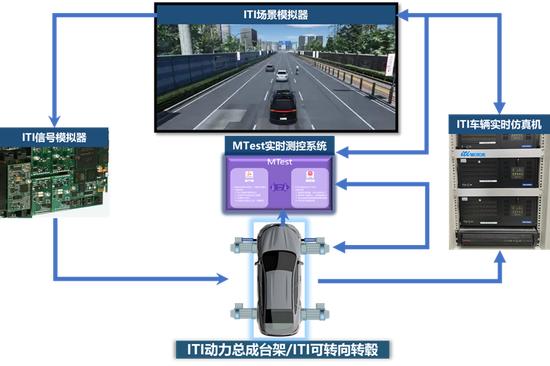
最後,整個車輛都已經具備,希望在實驗室環境內實現複雜、極端和失效工況的測試,實現跨域聯合調試。因此,構建整車在環測試系統,這裏需要對輪胎和道路等進行仿真建模,將構建的虛擬模型與真實的整車集成。這裏整車中的輪胎並不會像真實運行狀態下一樣工作,因此輪胎依然是模型。這裏,虛擬模型和真實被測件之間,除了信號級I/O、通訊之外,同樣需要機械加載設備(可以是四驅動力總成臺架+轉向負載模擬系統,也可以是可轉向整車轉轂)實現兩者之間的連接。
最後,簡單總結。上述半實物在環測試系統即可以應用於乘用車,也可以應用於商用車。面對,商用車不斷進行低碳化和智能化升級的趨勢,我們可以構建燃料電池發動機在環測試系統,低碳燃料內燃機在環測試系統,燃料電池汽車多電聯調系統,商用車動力底盤在環測試系統,商用車整車在環測試系統等。
最後,和大家分享一個視頻,這個是我們給某主機廠做的一個智能駕駛整車功能的測試。首先,將車輛開到實驗室裏面一個可以轉向的轉轂上;接着,構建虛擬的環境和智能傳感器模型,並將模擬的攝像頭數據,雷達數據等注入智能駕駛域控制器,讓智能駕駛的整車以爲運行在仿真的環境中。這樣,通過改變仿真的場景,就可以在實驗室環境裏面做各種智能駕駛功能的測試。
非常感謝,歡迎交流。
責任編輯:梁斌 SF055












